Precision MEMS Inclinometer
This documentation covers part number 10-0000042.
Overview
The precision MEMS inclinometer is the most advanced non-electrolytic tilt sensing device available to the geophysical market. This device with an approximate resolution of 0.00179° is accurate enough for many sensitive geophysical applications, but operates over a large tilt range of ±30°. This broad range of operation makes deployment and leveling much faster than more precise tilt meters. The differential MEMS technology also means the device is lower cost, making it semi-disposable in harsh environments. The inclinometer has a built-in data logger and well as RS232 output, user configurable parameters, factory calibration, real-time clock, magnetometer, grounding points, and more! The unit is IP67 rated, so deployment outdoors is as simple as plugging in the weather-tight connector and leveling the unit.
Enclosure and Components
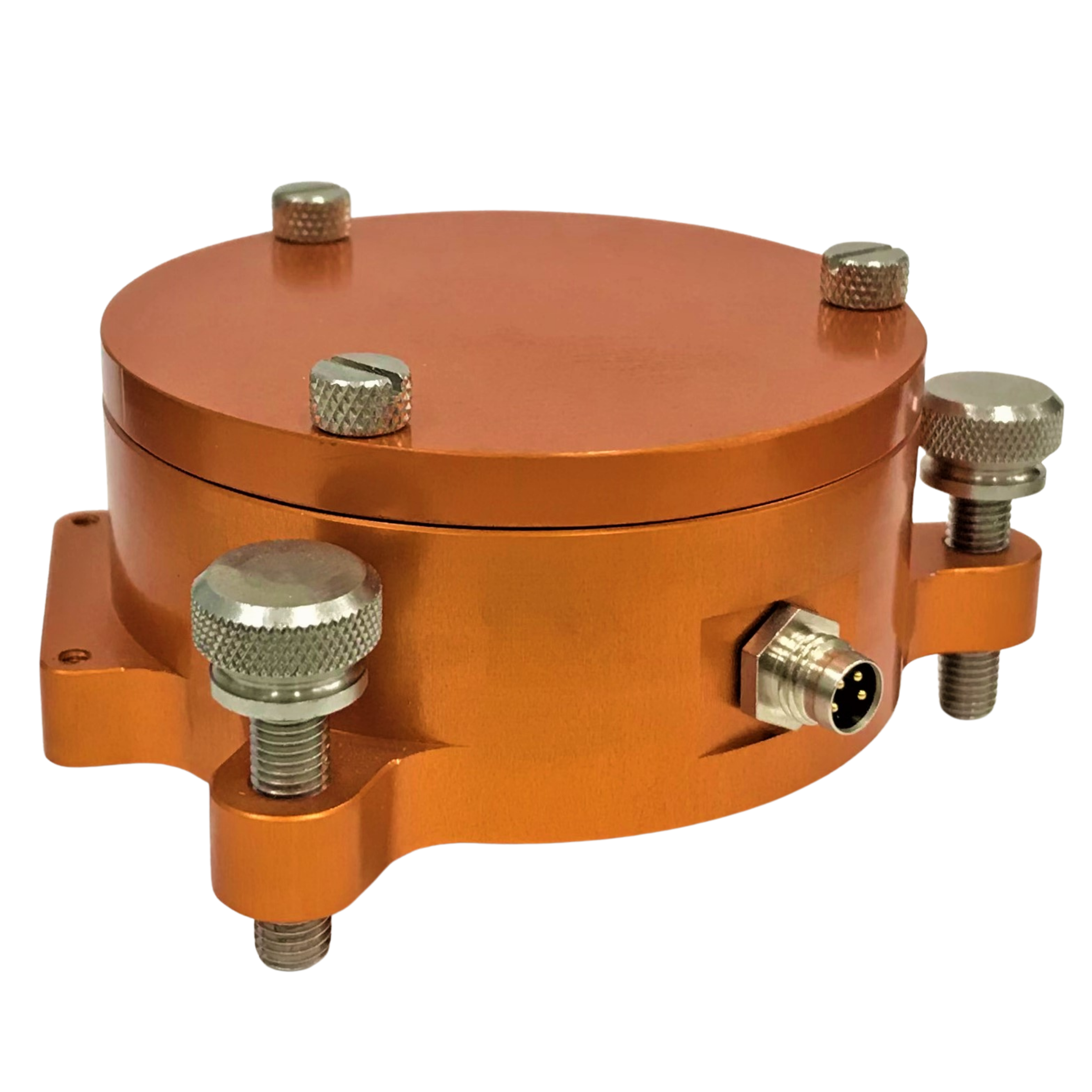
The inclinometer is housed in a precision machined and anodized Aluminum enclosure. There are three leveling feet with 1/4"-28 thread that allow the inclinometer to be placed on a surface and leveled or mounted to a mounting plate. The lid to the device is held in place with three thumbscrews and seals to the top of the enclosure with a rubber O-ring. On the rear of the enclosure there is a flat surface against which a field compass can be placed to measure the orientation of the inclinometer. On top of this flat are two #4-40 threaded holes that allow the attachment of a ground wire if desired. Replacement O-rings and hardware are available for order by contacting Leeman Geophysical LLC or via our website.
Inner Panel
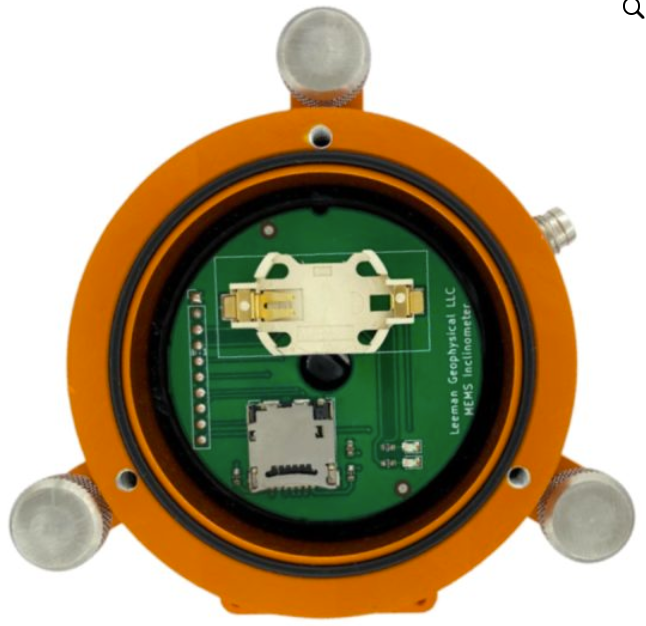
The inner panel of the unit provides visual feedback and component access to the user. There are four user accessible components. The battery holder accommodates one CR-2032 battery which provides power to the real time clock to maintain the date and time while the unit is powered off. The microSD card cage allows installation and removal of a microSD card storage media for in-unit logging. Finally, there are two indicator lights (red and green) that provide visual feedback. The red light is used to indicate errors and the green light indicates when a reading is being written to the SD card and/or sent via the serial interface.
Specifications
| Parameter | Min | Typ | Max | Unit |
| DC Input | ||||
| Voltage | 4.75 | 12 | 32 | VDC |
| Current | - | - | - | mA |
| Environmental | ||||
| Operating Temperature | -40 | - | 80 | ℃ |
| Physcial | ||||
| Weight | - | 375 | - | g |
| Width | - | 94 | - | mm |
| Length | - | 98 | - | mm |
| Height | - | 40 | - | mm |
Installation
Always consult local codes, guidelines, and professional guidance for installation.
Connector Wiring
The only external connector on the unit is the 4-pin Nano M8 connector. This connector provides power, ground, and RS-232 communications with the instrument. Mating cables, adapters, and more are available from Leeman Geophysical LLC.
| Wire Color | M8 Pin | Description |
| Brown | 1 | Power |
| White | 2 | RS-232 RX to instrument from device |
| Blue | 3 | Ground |
| Black | 4 | RS-232 TX from instrument to device |
Backup Clock Battery Installation/Removal
- Remove power from the unit.
- Remove the three thumb screws securing the lid to the enclosure and remove the lid.
- Gently remove the old CR2032 battery by holding down on the white plastic of the battery clip and lifting the underside edge of the battery. Do not exert excessive force or the battery clip and/or circuit board may be damaged!
- Install the new CR2032 battery by sliding the battery into the clip and gently pressing to lock it in.
- Reinstall the lid, ensuring that the O-ring gasket is properly seated. Tighten the three thumbscrews in an equal manner until finger tight.
- Reapply power and set the correct clock time.
SD Card Installation/Removal
- Remove power from the unit.
- Remove the three thumb screws securing the lid to the enclosure and remove the lid.
- Pull the top of the card card towards the rear of the unit, it will move several millimeters, then stop.
- Hinge the card up from the back of the unit towards the center.
- Remove/install a microSD card into the clip of the hinged part of the cage.
- Fold the cage back down and gently press towards the center of the unit, clipping the cage into place.
- If desired, power the inclinometer and verify operation of the unit.
- Reinstall the lid, ensuring that the O-ring gasket is properly seated. Tighten the three thumbscrews in an equal manner until finger tight.
Operation
Coordinate System
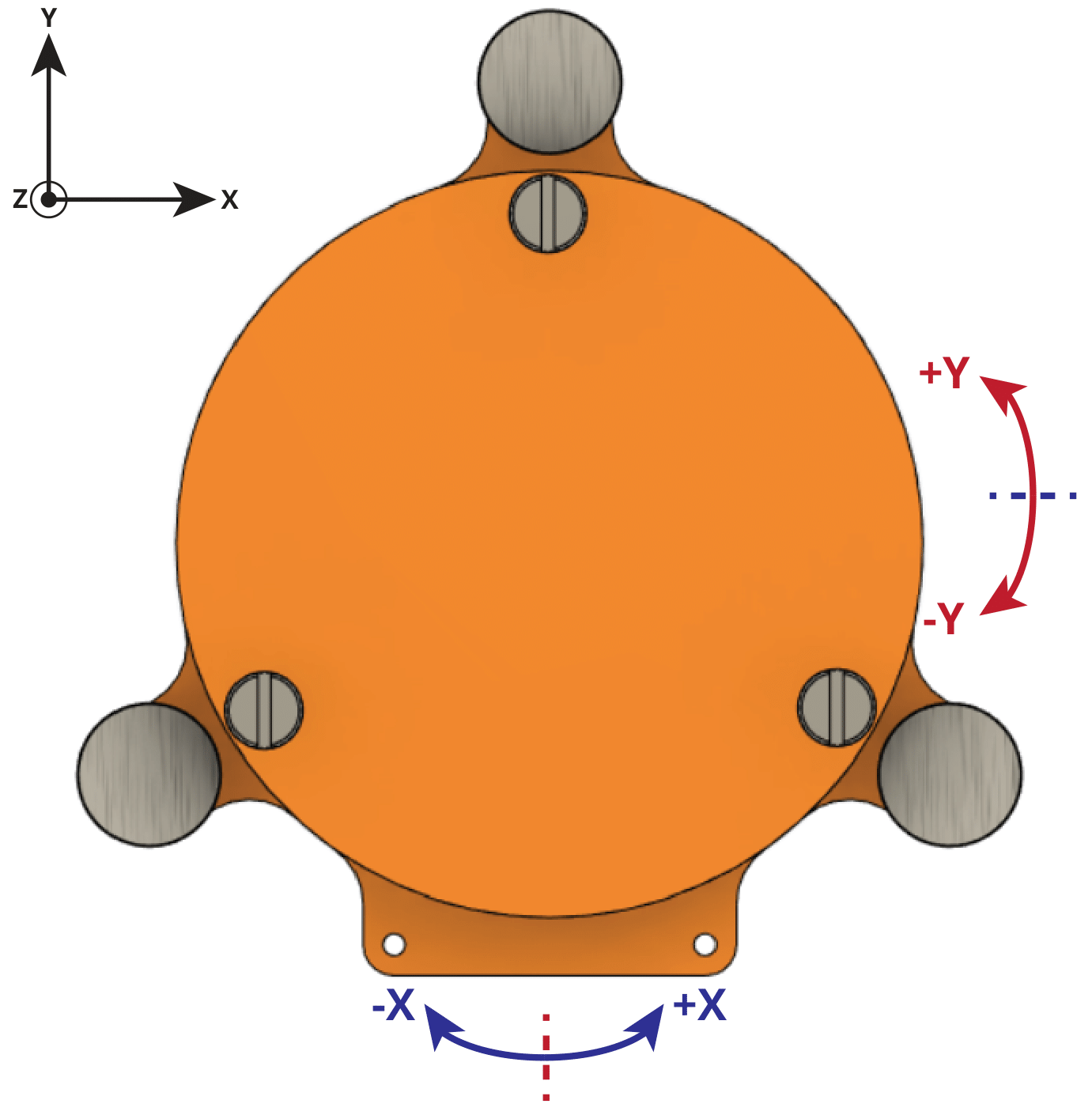
The tilt coordinate system is right-handed with the x-axis parallel to the flat along the back of the instrument and the y-axis perpendicular to the flat pointing towards the front foot. Tilts clockwise around the y-axis as viewed from the back of the instrument result in a positive x tilt reading. Tilts clockwise around the x-axis as viewed from the connector side of the instrument result in a positive y tilt reading. The on-board magnetometer has a coordinate system with z projecting upward out of the lid of the instrument. x and y are parallel with the instrument x and y plane.
Power Consumption and Warm-up
In an effort to reduce power consumption as much as possible, the instrument will put all sensors to sleep when no readings are scheduled to be taken for 60 seconds. When a reading is scheduled within 60 seconds, the instruments will be put into active mode. Instruments remain in active mode when the data rate divisor is set to 0 such that a reading can be commanded at any time.
Empirical tests indicate that the sensors do experience some drift as they warm up, hence the implementation of the 60 second warm up program. If your application requires different warm up or power parameters, contact us to discuss custom firmware modifications for your environment.
Serial Menu
The serial menu allows a few basic parameters to be set by the user from a serial terminal program. The serial menu operates at the user-set baud rate. Unlike other units, this unit does not have in-menu help to reduce code space and power consumption. Each command should be entered followed by a newline character.
| Command | Description |
| SB XXXX | Set baud rate (1200, 2400, 4800, 9600, 19200) |
| ST YYYY MM DD HH MM SS | Set the time |
| SR XXXX | Set the data rate divisor (0-3600) |
| R | Force a manual read of the instrument |
| S | Show the current device settings |
| SN XXX | Set the number of data points to be averaged (1-255) |
- SB sets the baud rate of the device to any valid baud rate in the list 1200, 2400, 4800, 9600, or 19200 baud. This setting is persistent through power cycles.
- ST sets the current time when the newline character is received. For example to set March 26, 2020 at 13:05:30 the command ST 2020 03 26 13 05 30 would be sent. This setting is time zone independent, but we always recommend collecting data in UTC. After setting the time, a power off reset is recommended as a way to verify the integrity of the clock backup battery.
- SR sets the data rate divisor in the range 0–3600 seconds. When the current Unix second is divisible by this divisor a reading will be taken. Setting the divisor to 0 means no readings will be taken and a R command must be issued to read. Recommended settings are those divisible into 3600 seconds (1 hour) evenly. Common settings are 1, 5, 30, 60, 300, 900, 1800, and 3600.
- R forces a manual read of the sensors as soon as the command is issued. This is commonly used in externally triggered systems with the data rate divisor set to 0, but can also be used with non-zero data rate divisors for triggering readings between timed readings, such as event based triggering.
- S shows the current system settings in the terminal.
- SN sets the number of readings to average together in the range 1–255. Averaging more readings takes longer, so generally is not suitable for faster data rates – a lag will be observed.
Deployment
Every deployment is different, but this procedure seeks to provide a guideline of best practices for deploying the precision MEMS inclinometer. Contact your applications representative for guidance on your specific application.
- Connect the unit to a computer with a programming cable (preferably prior to going to the field) and configure the desired settings.
- Ensure the time setting is correct and the coin cell backup battery is installed. (We recommend a yearly change if the unit is in storage.)
- If data are to be logged internally, ensure there is a microSD card (FAT16 formatted) with adequate space installed in the card cage.
- In the field choose the deployment site and mounting strategy. Set the unit on a firm, flat surface, bolt it to a mounting plate, or otherwise secure it. Always consider siting on the unit to be out of the low flooding area, inconspicuous, and away from large tilt inducers such as trees.
- Level the unit as nearly as feasible. The more level the unit is, the more operation will be in the linear band and the less likely a tilt-corrected analysis strategy will need to be used for the magnetometer data. The inclinometer itself can be used for leveling when the data are viewed on a computer or a precision circular bubble level, available from Leeman Geophysical, can be used for quick and easy leveling.
- Connect the power/data cable. Apply power and verify that the unit is logging. The unit will always log a data point on startup, so powering up with the lid removed should result in a green flash as the first data point is recorded. Any red lights indicate an error and should be addressed.
- Seal the unit with the provided O-ring and lid, being careful to only finger tighten the screws.
Error Codes
Error codes are flashed on the red LED under the lid and printed to the serial terminal. Some errors which would result in incomplete data will continually restart the unit in an effort to fix the problem, while others will warn once and then continue operation.
| Error Code | Description |
| 1 | Magnetometer error - unit will restart in an attempt to fix the issue |
| 2 | Temperature error - unit will restart in an attempt to fix the issue |
| 3 | SD error - warns once, then continues operation. This allows for external logging without the requirement of an SD card being installed |
| 4 | Clock error - unit will restart in an attempt to fix the issue |
Filename Convention
Data are stored on the microSD card (if installed) in 24-hour files. Each file is named with the year, month, and date of the data it contains in a 8.3 format. If a file with that filename already exists on the microSD card, the new data will be appended to the end of the file.
YYYYMMDD.TXT
Calibration
Each unit is calibrated at the factory before leaving the facility and the calibrations stored in the unit. Full calibration data is also provided with each unit to allow user applied corrections to be made to the data as necessary.
Tilt Calibration
Tilt calibrations may be performed on any stage in which tilt is retrained to one axis and is known precisely. The device under test is subjected to a range of tilts in the operating range of interest and the raw values from the sensors recorded and used to determine a calibration factor. Tilts are the most accurate and linear in the \(\pm3^\circ\) range, acceptable in the \(\pm30^\circ\) range, and often need non-linear corrections beyond that range.
Temperature Compensation
Temperature may effect the scale and offset of the tilt sensor calibration. While differential MEMS technology is not as prone to large temperature sensitivity offsets, they are observable. Factory provided temperature data may be used, or more often, a field calibration is determined by cross plotting temperature and tilt as this also corrects for thermal expansion of the mounting surface. This method may be undesirable if the temperature induced tilt is to be part of the study.
Cross-Axis Calibration
Cross axis errors (detailed later) may be accounted for by tilting the instrument only in one axis and observing any tilt signal on the other axis. A correction may then be applied in the form of a linear correction or coordinate rotation as necessary.
Magnetometer Offsets
Magnetometer offsets are of the hard-iron and soft-iron variety. An ideal magnetometer, if spun in every axis, would create an x, y, z point cloud that is a sphere, centered at the origin, with a radius with a magnitude equal to that of the Earth's magnetic field. The offset from the origin is called the hard-iron offset and must be corrected for the data to be useful. The degree to which the sphere varies from a perfect sphere is the soft-iron offset and may be corrected for precision applications as outlined in application notes. The factory determined hard-iron offset is applied in the instrument, but we recommend collecting calibration data at each deployment site in case other corrections need to be applied in post-processing.
Data Interpretation
Data are recorded on the microSD card and output through the RS-232 system with identical formats. Custom formats may be created for your application upon request. Data are tab delimited and decoded as follows.
477941 1 2000/01/01T00:08:27 2331 1302 452 2330558 80908 -8420 4714 -4011
| 477941 | 1 | 2000/01/01T00:08:27 | 2331 | 1302 |
|---|---|---|---|---|
| Millisecond Counter | NAVG | Time stamp | Temperature | X Tilt Counts |
| 452 | 2330558 | 80908 | -8420 | 4714 | -4011 |
|---|---|---|---|---|---|
| Y Tilt Counts | X Tilt | Y Tilt | X Magnetometer Counts | Y Magnetometer Counts | Z Magnetometer Counts |
- Millisecond Counter – Milliseconds since power was applied to the processor in the instrument. This number will overflow (reset to zero) after approximately 50 days.
- NAVG – How many tilt readings were averaged in this sample.
- Time stamp – Time the reading of the sensors began for this entry.
- Temperature – Temperature of the unit in degrees Celsius multiplied by 100.
- X Tilt Counts – Raw 16-bit value of the x tilt sensor. Often used when applying a custom calibration in post processing.
- Y Tilt Counts – Raw 16-bit value of the y tilt sensor. Often used when applying a custom calibration in post processing.
- X Tilt – Small angle x tilt calibrated to degrees multiplied by 100000. Calibration provided by factory is applied and valid for small tilts.
- Y Tilt – Small angle y tilt calibrated to degrees multiplied by 100000. Calibration provided by factory is applied and valid for small tilts.
- X Magnetometer Counts – Raw 16-bit value of the magnetometer x axis sensor. Generally these values are just used as counts as calibration to Gauss is not needed for orientation information. Hard iron offset (set at the factory) is applied to this reading.
- Y Magnetometer Counts – Raw 16-bit value of the magnetometer y axis sensor. Generally these values are just used as counts as calibration to Gauss is not needed for orientation information. Hard iron offset (set at the factory) is applied to this reading.
- Z Magnetometer Counts – Raw 16-bit value of the magnetometer z axis sensor. Generally these values are just used as counts as calibration to Gauss is not needed for orientation information. Hard iron offset (set at the factory) is applied to this reading.
Tilt Interpretation
Tilt can be subject to many technical factors as well as the environmental tilt. Leeman Geophysical has application notes on many of these topics and can assist you in determining which factors may need to be accounted for in your data. The list below is intended to help plan your field deployment strategy and guide your analysis. For most analyses under \(\pm30^\circ\) the factory calibration, applied in the instrument, is all that is required.
- Temperature Scale Factor – Temperature can modify the calibration of the tilt sensors making them slightly more or less sensitive. This factor is generally very small in our differential MEMS instrument and often neglected.
- Temperature Offset Factor – Temperature can change the zero point of the tilt sensor, often observed as several to tens of thousandths of a degree for small environmental temperature changes. Often this factor is corrected combined with temperature induced deformation.
- Temperature Induced Deformation – Changes in temperature can result in the expansion and contraction of the instrument enclosure, feet, mounting surface, or object under study. This effect is difficult to distinguish from temperature offset factor corrections and both are generally done at once by observing the correlation between temperature and tilt.
- Cross-Axis Tilt – Imperfections in how the tilt sensing elements are mounted relative to each other and to the enclosure can result in cross-talk between the axes. This small correction can be applied via coordinate system rotations if necessary.
- Off-Axis Tilt – Tilts on one axis, especially large tilts, can incline the other axis sensor from the horizontal plane resulting in offsets. These are generally treated as cross-axis tilt errors as they are indistinguishable in the data, but arise from a different mechanism.
- Mounting Error – Mounting the instrument to a surface which is not stable will result in tilt readings not resulting from the process under study.
Orientation Interpretation
The magnetometer in the instrument has a hard-iron correction applied to offset the errors resulting from the instrument itself. Environmental factors, metal, and nearby power wiring can result in further offsets or in soft-iron corrections. For more information on these corrects, see our application notes or contact support. We recommend collecting a set of magnetometer calibration data at deployment by setting the instrument to 1Hz logging and slowly rotating it into all orientations, creating a sphere of magnetometer data points to be use for correction determination.
Assuming a horizontal mounting of the instrument with minor tilts, orientation of the instrument with respect to magnetic north is easy to calculate:
For applications with significant tilts, a tilt correction must be applied and all three of the magnetometer's axes utilized. For more information on this correction, see our application notes or contact support.
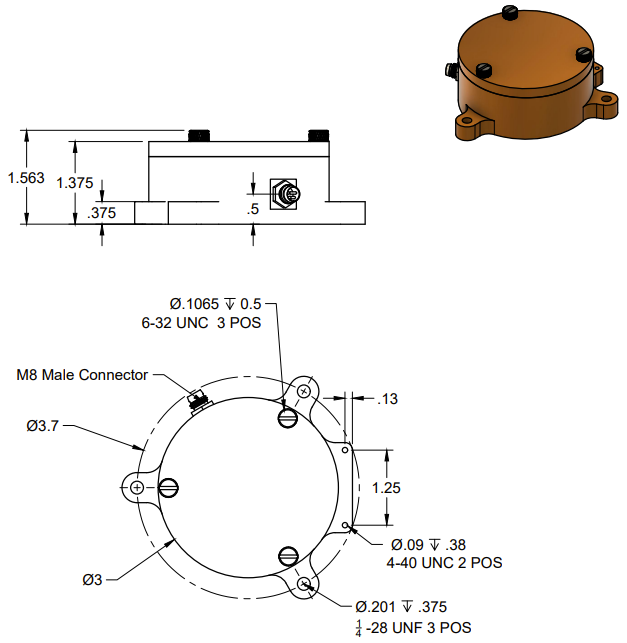
Dimensions
Revision History
| Date | Changes |
| April 2024 | Reformat for web and add dimensions. Minor typo correction. |
| December 2023 | Update address and change inaccurate description of file output columns. |
| February 2022 | Initial Release |